„Roboterhände mit sensomotorischen Schleifen für feinfühliges Greifen“ ist ein Robotik-Projekt des Studiengangs Humanoide Robotik, das im Sommersemester 2021 erstmalig durchgeführt würde. Im Rahmen des Projektes entwickelten Studierende in Gruppenarbeit eigenständig robotische Hände. Laborleiter Prof. Dr. Hannes Höppner betreute das Vorhaben mit Unterstützung von Prof. Dr. Manfred Hild und Simon Untergasser.
Der Bachelorstudiengang Humanoide Robotik wird an der Beuth Hochschule seit dem Wintersemester 2018/19 gelehrt. Studierende lernen hier, Roboter mechanisch zu konstruieren und zu fertigen, elektronische Schaltungen zu entwickeln und Lernfähigkeit zu programmieren. In dem Modul „Robotik-Projekt“ können Studierende die Grundlagen der reaktiven Robotik und Sensomotorik in der Praxis vertiefen.
Für die Anfertigung der robotischen Hände durften die zwölf teilnehmenden Gruppen die im Labor für Humanoide Robotik zur Verfügung stehenden Fertigungstechnologien nutzen: 3D-Druck, das Laserschneiden, das Vakuumthermoformen sowie das Gießen von weichen Fingern mit Polyurethan, einem gummiartigen Material.
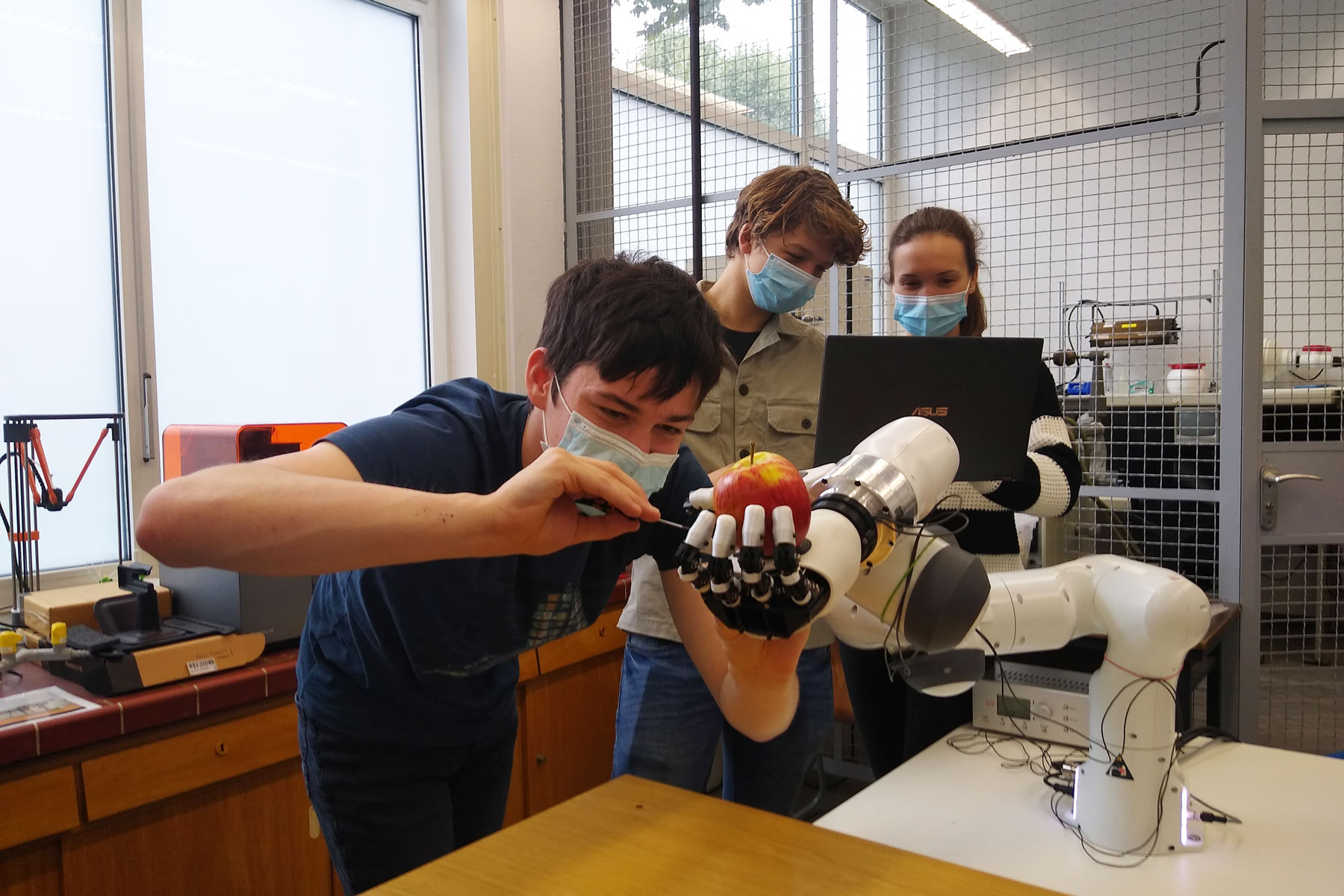
Den Gruppen wurden jeweils drei zufällig ausgewählte Benchmarks vorgegeben, die von der robotischen Hand gegriffen und im Umkreis von 20cm abgelegt werden mussten, darunter eine Visitenkarte, ein Schwamm, ein Apfel, eine Banane, ein markiertes Ei aus einem 6er-Pack, eine Aluminium-Tube und ein Limetten-Netz. Um die Bewegung per Hand herbeizuführen, wurde diese am kollaborativen Roboter „Panda“ von Franka Emika angeschlossen.
Das Ergebnis: Die erstellten, robotischen Hände weisen eine große Vielfalt in ihrer Ansteuerung und Konstruktion auf – es entstanden sowohl fünf-Finger-Hände als auch Parallelgreifer. Eine der Gruppen verknüpfte das Projekt mit dem Modul „Pneumatische Robotik und Softrobotik“ und nutzte im Gegensatz zu den anderen Gruppen Druckluft anstatt der Motoren, um die Hand in Bewegung zu setzen.
Hannes Höppner zeigt sich über die Ergebnisse begeistert:
„Die mechatronische Entwicklung der robotischen Hände mussten die Studierenden pandemiebedingt komplett remote von Zuhause aus durchführen, notwendige Treffen fanden über Telekonferenzen statt. Nur die eigentliche Fertigung und die spätere Kombination mit dem Roboter wurde im Labor durchgeführt. Vor diesem Hintergrund habe ich eine derartige Qualität der Roboterhände nicht erwartet. Selbst die schwierigsten Benchmarks wurden dabei von den Studierenden gemeistert. Ein schöner Nebeneffekt: Einige Gruppen (beispielsweise „Destra” und „ARIH”) haben ihre Ergebnisse auch in den sozialen Netzwerken geteilt. Dadurch sind namenhafte Hersteller aus der Robotik auf die Arbeiten aufmerksam geworden und haben diese über firmeneigene Accounts verbreitet.“
Der Erfolg spricht für sich: Im kommenden Sommersemester wird das Modul „Robotik-Projekt“ wahrscheinlich erneut auf Hände ausgerichtet.